La nouvelle ère de l’exploration spatiale miniature

L’exploration spatiale connaît une véritable révolution d’échelle. Si les missions lunaires nous ont habitués à des véhicules de la taille d’une voiture, bardés d’équipements scientifiques complexes, ou à d’immenses charges utiles propulsées par des fusées géantes, une nouvelle approche fait désormais ses preuves. Il s’agit aujourd’hui de s’appuyer sur une machine miniature, capable de changer de forme, dont les dimensions ne dépassent pas celles d’une paume de main moyenne.
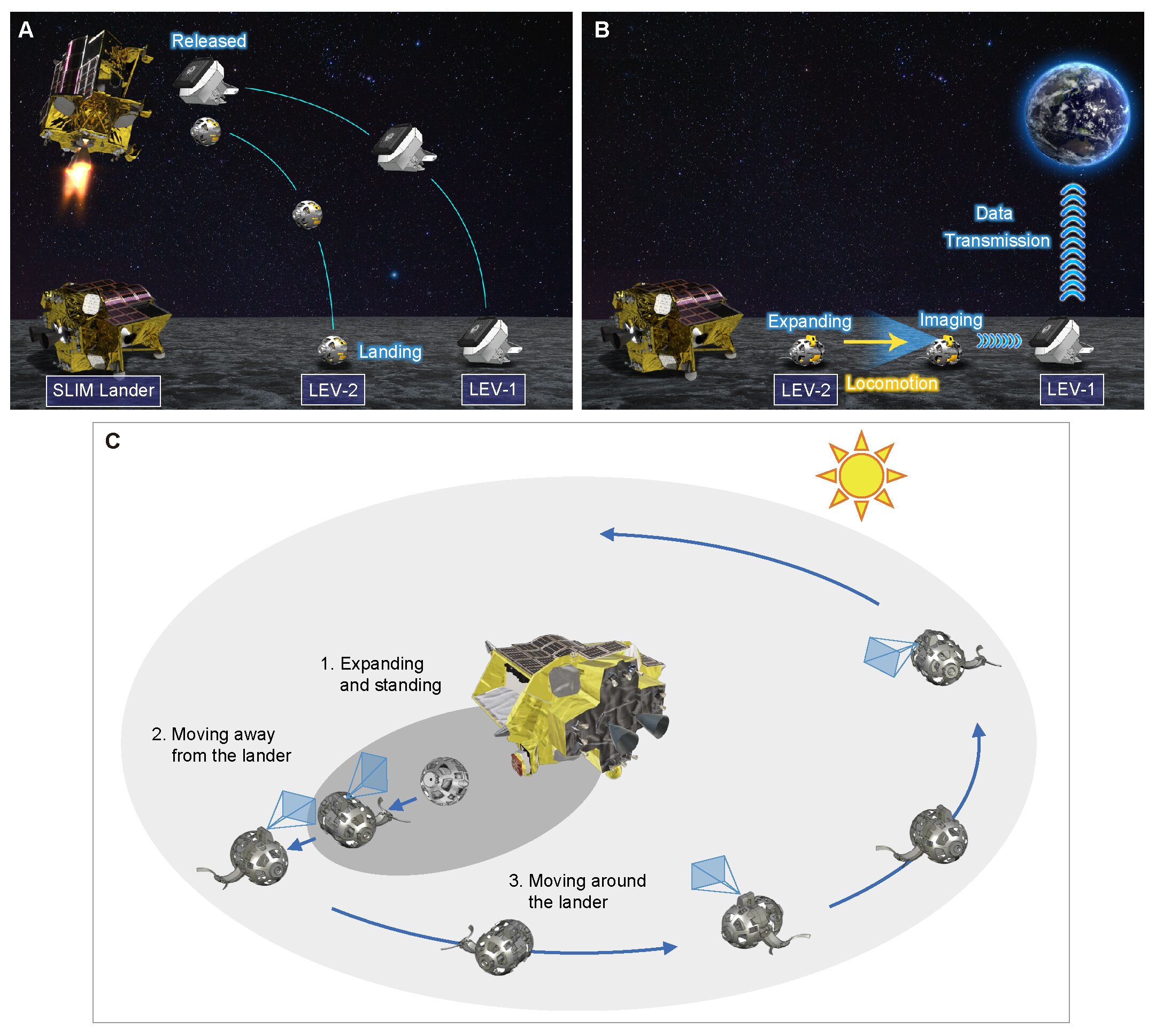
Cette prouesse technologique a été démontrée lors de l’arrivée sur le sol lunaire de l’atterrisseur japonais Smart Lander for Investigating Moon, connu sous l’acronyme SLIM, au cours de l’année 2024. Lors de cet événement historique, un minuscule astromobile nommé LEV-2, et affectueusement surnommé SORA-Q, s’est déployé sur la surface extraterrestre pour mener une exploration en totale autonomie pendant près de deux heures.
Aujourd’hui, de nouvelles données permettent de comprendre en détail les coulisses de cet exploit scientifique. Comme le rapporte une récente publication dans la prestigieuse revue spécialisée Science Robotics, la communauté scientifique découvre comment cette toute petite machine a réussi à naviguer sur un terrain accidenté, à prendre ses propres décisions d’itinéraire et à documenter ses découvertes de manière inédite.
Le paradoxe des véhicules ultra-compacts

Le recours à des astromobiles de taille très réduite présente des bénéfices considérables pour l’avenir de l’exploration du cosmos. Les ingénieurs apprécient particulièrement les coûts de développement relativement bas associés à ces projets miniatures. Leur conception légère offre une flexibilité précieuse, leur permettant de s’insérer facilement dans des engins spatiaux souvent encombrés par une multitude d’autres instruments scientifiques lourds et volumineux.
Toutefois, la miniaturisation extrême s’accompagne d’une longue série de défis techniques complexes à relever. L’un des obstacles majeurs concerne la nature même du sol lunaire, qui s’apparente à une poudre fine et fuyante. Les microrobots ont fréquemment du mal à se déplacer sur ce type de surface, car leurs minuscules roues se retrouvent facilement piégées ou enlisées dans la poussière régolitique.
Au-delà de la mobilité physique, la contrainte de l’intelligence artificielle embarquée constitue un autre frein de taille. Ces engins doivent posséder une intelligence suffisante pour prendre des décisions en temps réel. Or, l’utilisation de batteries et de processeurs miniatures limite drastiquement leur puissance de calcul. Ces exigences viennent s’ajouter aux limites strictes de taille et de poids inhérentes à toute mission lancée dans l’espace.
Une conception ingénieuse issue du monde des jouets
Afin de contourner les limites imposées par la taille du module d’atterrissage, l’agence spatiale japonaise, la JAXA, a pris la décision innovante de s’associer avec le célèbre fabricant de jouets TOMY. De cette collaboration inattendue est né un astromobile capable de modifier sa propre structure physique en cours de mission. Les concepteurs se sont directement inspirés des jouets en forme de boule qui ont la capacité de se transformer en petits véhicules à roulettes.
Cette approche conceptuelle singulière a permis au dispositif de voyager vers la Lune sous la forme d’une sphère extrêmement compacte, optimisant ainsi l’espace au sein de l’atterrisseur SLIM. Ce n’est qu’après avoir touché le sol lunaire avec succès que la machine a pu se déployer mécaniquement pour révéler sa véritable forme fonctionnelle et entamer son périple exploratoire.
Une fois la structure ouverte, un mécanisme ingénieux s’est mis en marche. Les roues du robot tournaient autour d’un axe volontairement décalé par rapport au centre de gravité. Ce choix de conception, directement issu d’une innovation développée par le fabricant de jouets TOMY, a grandement aidé l’astromobile à gagner en traction et à progresser efficacement dans le sol lunaire meuble et poudreux.
Une stratégie de communication en binôme
L’autre défi majeur d’une telle mission reposait sur la transmission des données récoltées vers la Terre, une opération particulièrement gourmande en énergie. Pour économiser l’autonomie de sa batterie miniature et préserver sa puissance de traitement informatique, les ingénieurs ont dû concevoir une stratégie de communication alternative. Il était impensable que le minuscule robot tente d’émettre des signaux radio directement vers les antennes terrestres situées à des centaines de milliers de kilomètres.
La solution adoptée a consisté à mettre en place un système de binôme sur le terrain. L’astromobile miniature ne travaillait pas de manière isolée, mais en collaboration étroite avec un autre dispositif. Il a ainsi relayé l’ensemble de ses précieuses données télémétriques et de ses photographies vers un astromobile compagnon, désigné sous le nom de LEV-1, qui se trouvait à proximité sur le site d’alunissage.
Ce second robot, doté d’équipements de communication plus puissants, a joué le rôle de station relais indispensable. C’est le module LEV-1 qui a pris en charge la lourde tâche de transmettre les informations collectées par son petit partenaire directement au centre de contrôle de la mission, assurant ainsi la réussite de la chaîne de transmission sans épuiser les ressources du robot explorateur.
Un succès retentissant pour la robotique miniature
Les données rapportées par l’équipe scientifique dans leur publication officielle soulignent une réussite technologique remarquable. Bien que la durée de vie opérationnelle de cette petite machine ait été limitée, elle a fonctionné pendant environ 108 minutes avant que les communications ne soient définitivement perdues. Durant ce laps de temps très court, le robot a réussi à envoyer d’importantes images à haute résolution de l’atterrisseur et de ses environs.
La performance du dispositif démontre les avantages indéniables de la robotique spatiale miniature pour l’avenir. L’équipe décrit d’ailleurs ce succès en détail dans l’article source, expliquant : « LEV-2 … a accompli une exploration lunaire autonome en naviguant autour de l’atterrisseur SLIM, en capturant des images de l’atterrisseur SLIM et de son environnement, et en transmettant des images sélectionnées … sans dépendre de la téléopération au sol. »
Les conclusions tirées de cette mission ouvrent la voie à de nouvelles méthodes de conception pour les agences spatiales internationales. Comme le soulignent les auteurs de l’analyse, l’expérience confirme la viabilité des petits systèmes intelligents : « Cette étude a démontré que les opérations de surface autonomes peuvent être réalisées en utilisant des plates-formes robotiques extrêmement compactes. »
Selon la source : phys.org
Comment un petit rover transformable inspiré de jouets japonais a exploré la Lune de manière autonome